
最近一段时间关于自动驾驶的话题真是热闹,前脚有联合国欧洲经济委员会将自动驾驶纳入了国际道路交通公约,后脚有沃尔沃宣布在中国设立自动驾驶测试基地,上周长安汽车完成了从重庆到北京2000公里无人驾驶道路测试……自动驾驶这个话题在2016年这个春天火到不得了!
自动驾驶代表了未来汽车发展趋势
我们需要自动驾驶
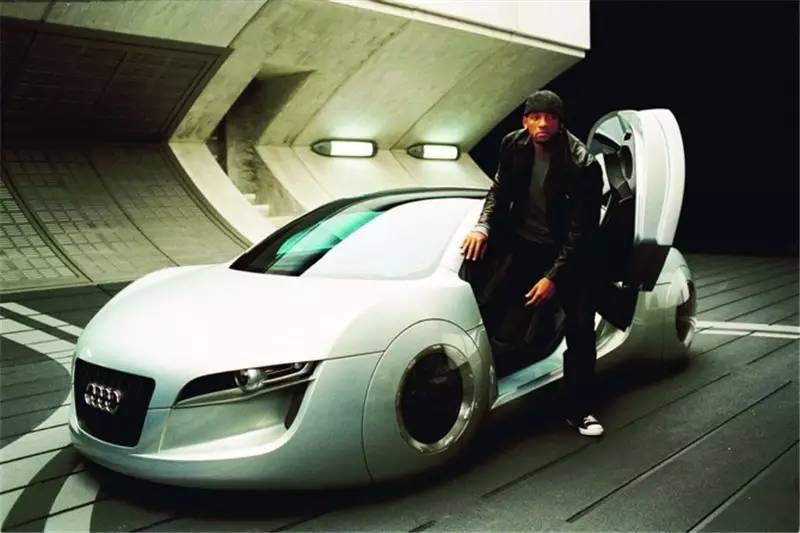
有时候,我们喜欢把自动驾驶这一话题放到人工智能的大概念里去说。其实,人工智能这一话题范畴之广、影响之大,甚至可以建立一个全新的、与众不同的人类社会。荒谬的电影场景已经说明,这在现实生活中看起来很美但是很遥远。在电影场景中,房间可以感知人类的情绪;机器人会为我们服务甚至成为感情的依托;驾驶汽车通常是为了躲避坏蛋的攻击而非常规地去超市买东西。你知道的,不论是《I Robot》里威尔•史密斯开始亲自驾驶奥迪RSQ还是真实世界里飞行员开始操纵飞机降落,人类接管智能,意味着人类智慧是超越人工智能的,意味着不论科技如何进化,人类依然是决定者而无法替代。
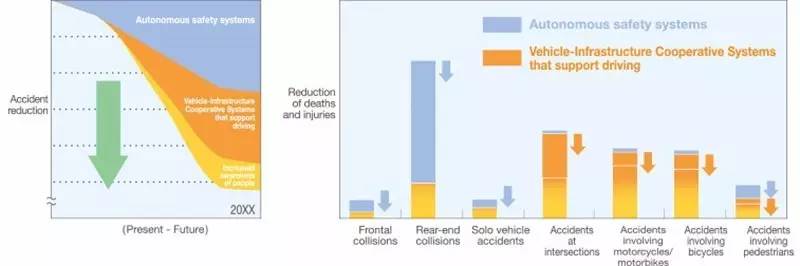
但是仔细想想,自动驾驶其实是对立的,自动驾驶可以决定汽车时速和走向,汽车不再直接由驾驶者操纵。但为何我们还需要自动驾驶?抛开对于道德伦理法律规则的讨论,我们的日常生活并不需要我们每时每刻都做英雄,电影中的场景切实表达了人们超越现实科技后的真实需求:只有在需要英雄的时候,我们才会出场,威尔•史密斯才会接过方向盘。而在大部分时间内,人类智慧本身的无序或者个体性会让整个社会或者交通变得低效甚至危险。这也正是为什么,沃尔沃在实现0事故的目标时,强调人工智能、自动驾驶的重要性。
不过,人工智能的趋势已经确定,因为所有人都会追求更美好的世界。而人类对于汽车投注的偏好,反而让自动驾驶早于其他人工智能进入了现实世界。SO,不久前联合国欧洲经济委员会将自动驾驶纳入了国际道路交通公约。
从驾驶员辅助系统到自动驾驶

对于我们而言,自动驾驶可能是一个新鲜技术,但驾驶员辅助系统却早已不再陌生,且参与了我们当前的驾驶行为。如果按照美国高速公路管理局NHTSA对于自动驾驶这一概念的定义分级,我们已经远离了曾经长久停留的第一和第二阶段。通过ESP(车辆稳定系统)、ABS(车轮防抱死系统)以及EBA(电子制动力辅助系统),我们在行驶紧急状况中得到了来自自动系统的辅助,达到了更好控制车辆的目的。
不要小看这几样频频出现在各种车型标准配置中的“高科技”,他们反映了实现自动驾驶必须经历的过程。目前汽车工程师们正在努力地通过创造更多辅助功能、改进辅助功能来推动自动驾驶科技的向前发展。这样的努力有了很好的结果:已经有部分车辆在部分状态下实现了自动驾驶,例如搭载Autopilot系统的Tesla Model S以及搭载Drive Pilot系统的全新一代梅赛德斯奔驰E级轿车。
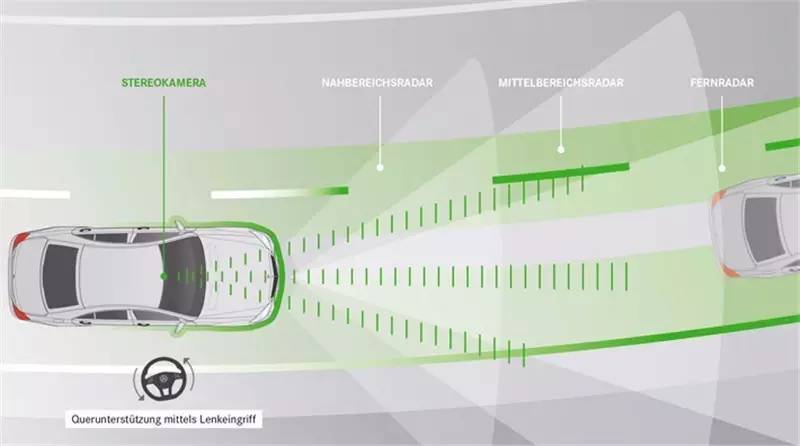
众多实现“自动驾驶”功能的汽车都有相似的系统结构,即以车载传感器信号为基础,实现车辆对于行驶周围环境的判断和辅助。例如,在车辆前进方向上,首先要识别障碍物的距离。雷达作为传感器通过发射和接收雷达波来探知前方障碍物的距离,通过这一功能实现了主动巡航功能,在调节车速与距离上实现了自动化。
单纯从主动巡航系统的发展历史来看,这一功能可以分为几个阶段,从一定速度区间(如30-150公里/小时)到整个速度区间(如0-220公里/小时),系统功能拓展和补全的背后其实是车辆控制系统的深入和成熟。除了障碍物的距离,我们还需要知道障碍物的位置或者交通标志的信息,这样我们才能够更为准确地研究障碍物行为的走向、主动获取交通标志信息,因此我们需要一只“眼睛”——摄像器。不过受制于一只“眼睛”的安装位置和精度,并不能准确探知障碍物实际位置的变化,因此引入了多目摄像头。摄像头画面信息的提取和处理让我们知道了自己以及目标物体的位置关系,由此可以判断我们是不是越过了车道线、交通标志上写的是什么信息、从右侧道路驶来的是汽车还是行人。
以车道辅助系统为例,它实现了主动控制车辆位置的功能,在保持车辆位置上实现了自动化。但如同主动巡航功能,它也经历了警示车道偏离、修正偏离车辆的位置以及主动控制车辆位置等一整个发展阶段,与车辆系统的综合实现了如今丰富的功能。诸如此类的辅助功能还有许多,它们都在一定工作环境、一定功能范畴下实现了对于驾驶员的辅助,并经历了明显的发展成熟过程,但辅助功能应为驾驶员提供辅助而非取代驾驶员,因此对于这一设定的突破便表征了驾驶员辅助功能向汽车自动驾驶的变化。

单一系统的优化以及系统之间的整合、相互支持使人们逐渐看到自动驾驶的可能性。开启全速段主动巡航系统外加车道主动保持系统的汽车,已经可以实现在简单环境设定下的自动驾驶,比如奥迪全新一代Q7以及沃尔沃新款XC90搭载的城市拥堵功能,在0-50公里/小时区间内可以自动行驶、停车。
开启盲区警示功能外加转向辅助功能的Tesla Model S以及梅赛德斯奔驰E级轿车,可以在驾驶员命令下,判断超车时机、超车路线、找寻超越目标车辆并跟踪分析目标车辆的位置,最终完成超车动作。
此外,一些功能的进化,已经可以在一定限定环境缺失的情况下保证功能完整,例如,梅赛德斯奔驰E级轿车可以在道路标线缺失的情况下,通过前车位置判断车道走向,实现与人类相仿的行驶方式。
但你会发现将车辆放心地交给智能系统,都是在非常狭窄的工作情况内,大多数时间,车辆还是需要人类的指令,即便是自动驶出车库的汽车,也需要驾驶员持续给出允许指令。借助辅助系统,我们在通向自动驾驶的道路上,正如Google的Self-Driving Project依然是一个科技项目而非产品,我们依然在自动驾驶的门外,即便钥匙已经插入了锁孔。
辅助系统并非决胜的单一因素

通用汽车曾经提出,通过智能手机的信息共享实现智能交通
把辅助系统说得这么强大,其实是忽略了它们的局限性,而且是原理决定的局限性。例如摄像器会在强光、低对比度的环境中降低判断的准确性;例如雷达需要稳定的工作温度等等。这些局限性需要通过其他方式进行弥补,其中作用显著的当属Car-2-X技术。通过信息传输网络,所有的交通参与者都可以分享或者上传自己重要的行驶信息,例如位置、速度、方向等,这样的信息首当其冲被用于交通环境的判断,因此我们才能在百度地图上看到城市高峰路段时壮观的红色拥堵道路。在反向的,交通控制系统同样可以给予车辆关于交通的信息,例如躲避拥堵的备选道路、前方事故位置。当提供的信息充分到可以判断直接与行驶环境相关的其他车辆位置和信息时,这一技术便可以起到与之前所说的车载传感器相似的作用。由于这些信息与辅助系统提供的信息来源并不相同,因此后者可以成为前者极好的补充。
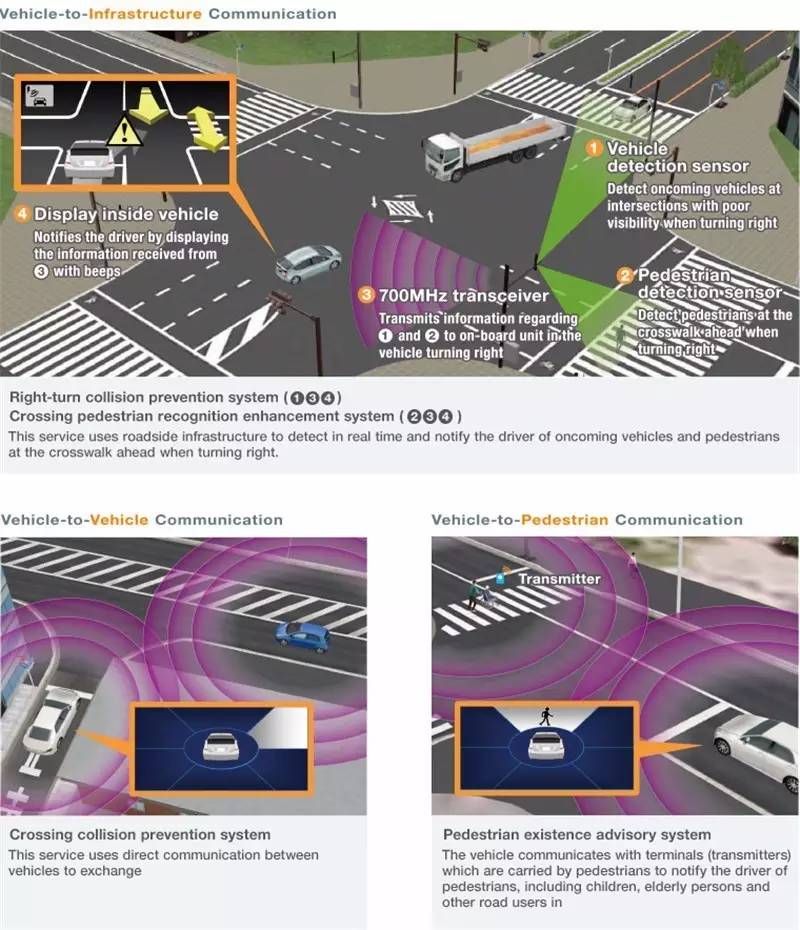
但是这样的技术需要各类与车辆无关资源的高度整合,因此相关的难度决定了其发展速度。丰田早在几年前便推出了这一设想的产品:ITS Connect系统,丰田在名古屋市设立了一些信号基站,用于实现车辆与交通设施(信号灯、监控器等)之间的信息传输。例如,监控器检测到车辆转弯时盲区内存在对向来车或者横穿行人,便会及时地将信息通知车辆。为了配合沃尔沃的Drive Me自动驾驶功能,瑞典哥德堡同样设置了相似的设施。但具备统一性、整体性的Car-2-X功能,目前仍然没有前景。
最后我们要说

在人工智能成为我们感情对象之前,我们还有很长的路要走
不论任务如何艰巨,我们依然在寻求实现更多功能以及更好功能的道路上。有人说AlphaGo战胜李世石说明了人工智能的强大,我们恐怕会树立一个可以战胜自己的对手。我们只是在追求更加美好的未来,那些随之产生的危险和不确定性,自有人类智慧决定的约束。所以作为人工智能前哨的自动驾驶,我们可以以一个开放的态度去欢迎,而非过早地浸淫在自己想象的特殊情况之中。对吧?
责任编辑
管小禹



长按识别二维码,关注我们
商务合作 | nijuemin@autokol.com
公关邀请 | zhaoran@autokol.com
点击 阅读原文 查看AutoKol官网
进入国内首个汽车行业自媒体整合资讯平台
(来源:排气管 )